宇宙用のフィルターターレットを考える メモ
2009/6/3
(文献)
The grating and filter wheels for the JWST NIRSpec instrument
K.Weidlich et al.(SPIE 2006)
・フィルタホイール(FWA)には7種類の透過フィルタ。
・フリズムホイール(GWA)には6種類のグレーティングと1個のプリズム。
・打ち上げ時は常温、運用時は30K。
・打ち上げ時の大きな振動負荷 ⇔ 高精度のポジショニング+光学素子の変形を最小に抑える
この二つの課題を一つのメカニズムでカバーする。
・Carl Zeissで製作・試験したISOフィルタホイール機構から実績のあるコンセプトを応用。
・Astrium GmbH。
・Austrian AerospaceとMPIAで協力。
・Carl Zeiss Optronicsで加工製作。
・仕様
・一度に100天体以上観測
・3x3arcmin以上の視野
・1-5um
・R=100,1000,3000
・できるだけ高感度
・MSA(Micro Sutter Array)で天体を選択。
・グレーティングは瞳面内のホイールに置かれる。
・広い波長にわたりR=1000とR=3000でカバーするのに、6つのグレーティングを用いる。
・ロングパスフィルタと併用。
・グレーティングとプリズムは反射系。位置精度が重要。
⇒フィルタホイールとグレーティングホイールで機能がだいぶ異なる。
・ポインティング・ラチェットを使用 ⇒2.5arcsec pointing repeatability。
・ISOPHOTフィルタホイールでラチェット機構を使用した経験より、
・モータのパワーOFF後も精度よく位置を維持。
・熱消費が小さい。
・クローズドループが必要ない。
・さらにグリズムホイールに要求されるのは、
・光学素子の角度精度はポジションセンサを用いて0.3arcsecで測定できるようにする。
Herschel/PACSでのやり方を踏襲。
・波面誤差バジェットがタイト。グレーティングのSurface flatnessやプリズムの表面は、冷却後の変形も含めて10nm rms以下。
・メカニズム全体の elasto-mechanism load(弾性機構的な負荷)に対する高度なマネージメント。
・NIRSpecの光学ベンチやミラーアッセンブリのように、low-CTE・high-stiffnessな単一の材料から作るわけにいかないので、
光学素子の変形を小さく抑えることが難しい。
・低温駆動試験が義務付けられており、コンポーネント単体からアッセンブリ状態まで何段階も試験が行われる。
・クリティカルな性能の大部分が既に試験されているのは、
・ベアリング摩擦トルク(bearing friction torque)
・表面変形(surfece deformation)と光学素子の波面誤差
・フィルタ透過率と位置センサの分解能。
・アッセンブリレベルの試験構成は、
・常温と低温での光学素子の位置精度
・常温でのフレーティングとプリズムの表面変形
・室温での位置安定性
・常温で運用時の配置にしたときのビーム歪み(deflection)
・FGAとGWAは環境、基本的な機能、instrument boundaries がほとんど一緒。GWAの仕様のほうが厳しいので
そのコンセプトはそのままFWAにも使える。
central duplex bearingや光学ベンチへの3点支持マウント(ISMs:isostatic mounts)など、
機構支持(チタン合金)とベンチ材(SiC)などCTEの異なる材質への対応は共有できる。
・支持機構に直接影響しないようなpositioning ratchetや位置センサにもマイナーな改造が必要。
・Grating wheel structure(GWS)は、「wheel disk」「optical mounts」「optical components(素子)」から成る。
wheel diskはドラム型で、central bearingのインナーリングにマウントされる。
光学素子はwheel diskの周囲に並べられる。光学素子の面はグレーティングホイールの回転軸から外れている。
・Filter wheel structure(FWS)は、「wheel disk」「filter components」「calibration mirror」から成る。
・positioning ratchet は、モータがオフになってホイールがずれた時に、ホイールをドライブすることができる。
この特性により、ホイールはいつも8つの位置のどこかには保持されるようになっている。
・ラチェットのヒンジがmechanism support(MS)にマウントされると、バイアスされたラチェットがwheel disk上の
ベアリングに押し付けられる。こうすると、ホイールが平衡の位置にいないときにホイールのトルクになる。
・GWSとFWSが全く別々に並んでいるときも、それらは支持機構に同じインターフェースでついている。
・質量や慣性モーメントのようなメカニカルインターフェイスパラメータは、支持機構内でaccommodateされる。
・基本パラメータ
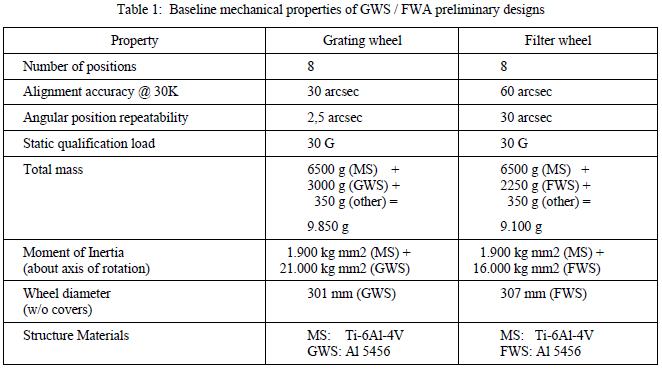 ・Ti-6Al-4V(チタン合金) ⇒低温特性
・Al5456
・静荷重 static qualification load 30G
・市販品を用いたメカ要素一覧。MIRIでも同様のものを使用している。
・Ti-6Al-4V(チタン合金) ⇒低温特性
・Al5456
・静荷重 static qualification load 30G
・市販品を用いたメカ要素一覧。MIRIでも同様のものを使用している。
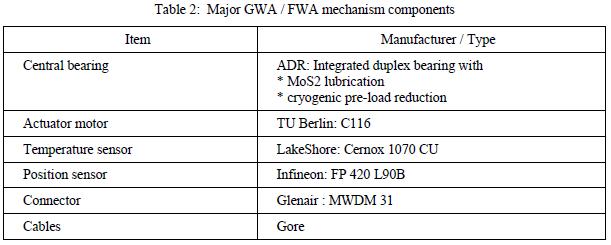 ・C166トルクモータ。低温用。駆動電流がオフになった場合に低トルク抵抗⇒ホイールの回転が終了したときに必要。
positioning ratchet がアクチュエータのようにはたらく。
・ギアは使っていない。モータ駆動トルクは1Nm以下に限定。安全な駆動のためには3段階のトルクが必要。
・ベアリングの摩擦トルクは全てのアクチュエータで十分にovercomeしないといけない。
・モータがスイッチオフ時でもラチェットトルクは十分にベアリングの摩擦トルクを克服できないといけない。
ラチェット駆動はホイールが最終位置に正確におさまるために必要。
・モータのトルクはベアリングの摩擦とポジショニングラチェットからのトルクを十分に克服できないといけない。
モータ駆動はホイールが次の位置に向かって動き始める時に必要。
・C166トルクモータ。低温用。駆動電流がオフになった場合に低トルク抵抗⇒ホイールの回転が終了したときに必要。
positioning ratchet がアクチュエータのようにはたらく。
・ギアは使っていない。モータ駆動トルクは1Nm以下に限定。安全な駆動のためには3段階のトルクが必要。
・ベアリングの摩擦トルクは全てのアクチュエータで十分にovercomeしないといけない。
・モータがスイッチオフ時でもラチェットトルクは十分にベアリングの摩擦トルクを克服できないといけない。
ラチェット駆動はホイールが最終位置に正確におさまるために必要。
・モータのトルクはベアリングの摩擦とポジショニングラチェットからのトルクを十分に克服できないといけない。
モータ駆動はホイールが次の位置に向かって動き始める時に必要。